The Cars Dataset
Here we’ll use the classic Cars dataset to illustrate different ways Gumbi can be used.
[ ]:
import gumbi as gmb
import seaborn as sns
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
plt.style.use(gmb.style.breve)
from warnings import filterwarnings
filterwarnings("ignore", message="No data for colormapping provided via 'c'. Parameters 'norm' will be ignored")
filterwarnings("ignore", message="find_constrained_prior is deprecated and will be removed in a future version. Please use maxent function from PreliZ. https://preliz.readthedocs.io/en/latest/api_reference.html#preliz.unidimensional.maxent")
filterwarnings("ignore", message="Using NumPy C-API based implementation for BLAS functions.")
Read in some data and store it as a Gumbi DataSet:
[2]:
cars = sns.load_dataset('mpg').dropna().astype({'weight':float, 'model_year':float})
ds = gmb.DataSet(cars,
outputs=['mpg', 'acceleration'],
log_vars=['mpg', 'acceleration', 'weight', 'horsepower', 'displacement'])
Create a Gumbi GP object:
[3]:
gp = gmb.GP(ds)
Now we’re ready to fit, predict, and plot against various dimensions in our datset.
Simple regression
[4]:
gp.fit(outputs=['mpg'], continuous_dims=['horsepower']);
/home/john/mambaforge/envs/gumbi-test/lib/python3.11/site-packages/pytensor/link/c/cmodule.py:2959: UserWarning: PyTensor could not link to a BLAS installation. Operations that might benefit from BLAS will be severely degraded.
This usually happens when PyTensor is installed via pip. We recommend it be installed via conda/mamba/pixi instead.
Alternatively, you can use an experimental backend such as Numba or JAX that perform their own BLAS optimizations, by setting `pytensor.config.mode == 'NUMBA'` or passing `mode='NUMBA'` when compiling a PyTensor function.
For more options and details see https://pytensor.readthedocs.io/en/latest/troubleshooting.html#how-do-i-configure-test-my-blas-library
warnings.warn(
[5]:
X = gp.prepare_grid()
y = gp.predict_grid();
pp = gmb.ParrayPlotter(X, y)
pp.plot()
sns.scatterplot(data=cars, x='horsepower', y='mpg', color=sns.cubehelix_palette()[-1], alpha=0.5);
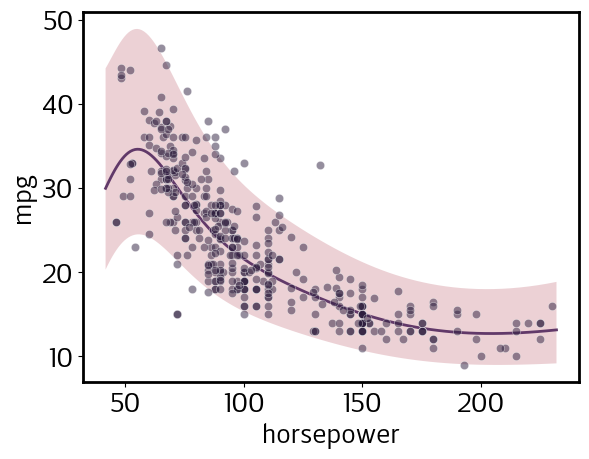
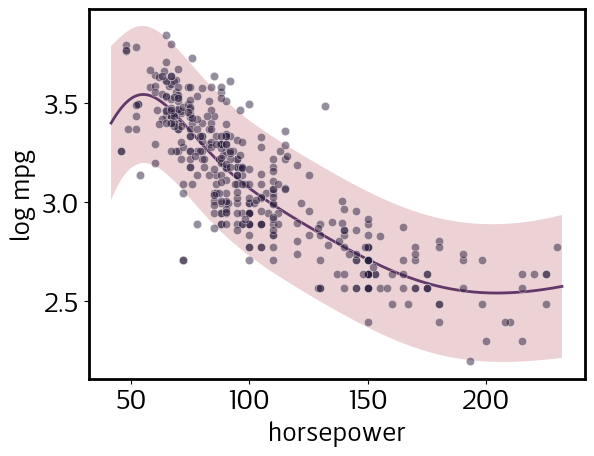
Note that, despite the error bands appearing wider at lower values of horsepower, this actually is a homoskedastic model; i.e., predicted noise does not depend on the input value. However, because we declared mpg among the log_vars when we defined our DataSet, the model is homoskedastic in log space. Let’s plot log(mpg) to illustrate this:
[6]:
pp.y_scale = 'transformed'
pp.y_tick_scale = 'transformed'
pp.update()
pp.plot()
sns.scatterplot(data=cars.assign(mpg=np.log(cars.mpg)), x='horsepower', y='mpg', color=sns.cubehelix_palette()[-1], alpha=0.5);
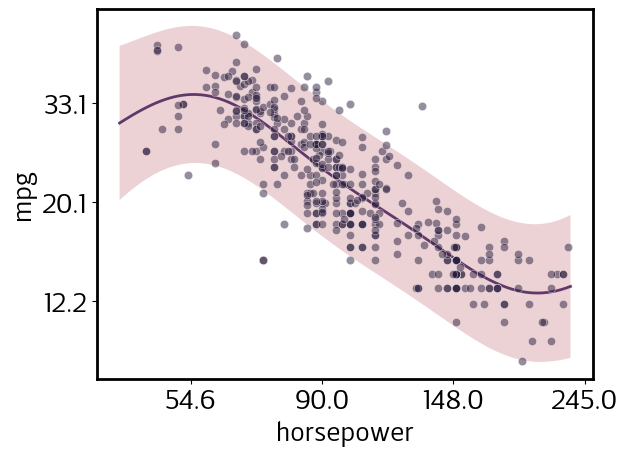
We declared horsepower to be a log_var as well. Let’s view both mpg and horsepower in log-space, but retain the natural-space tick labels for easier interpretation.
[7]:
pp.y_tick_scale = 'natural'
pp.x_scale = 'transformed'
pp.update()
pp.plot()
sns.scatterplot(data=cars.assign(mpg=np.log(cars.mpg), horsepower=np.log(cars.horsepower)), x='horsepower', y='mpg', color=sns.cubehelix_palette()[-1], alpha=0.5);
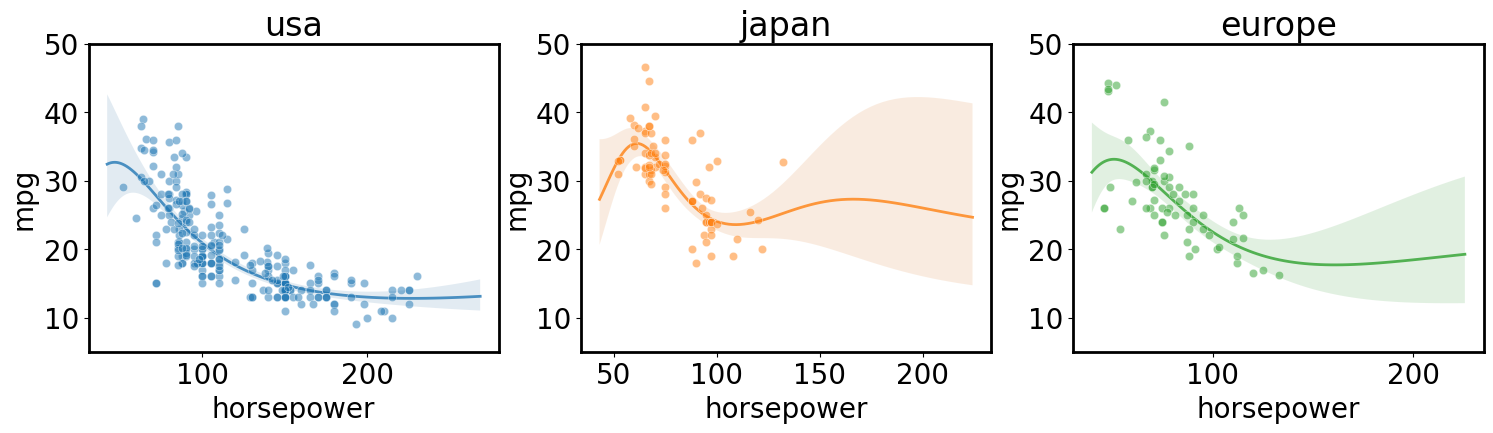
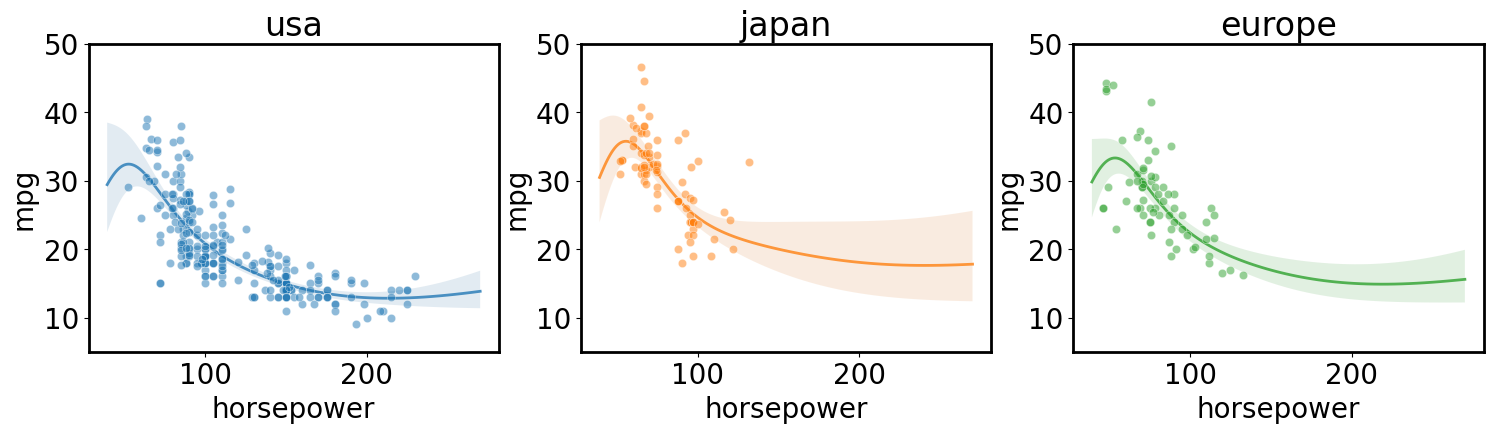
Independent regression for each class in a category
[ ]:
axs = plt.subplots(1,3, figsize=(18, 4), sharex=True, sharey=True)[1]
for i, (ax, origin) in enumerate(zip(axs, cars.origin.unique())):
gp.fit(outputs=['mpg'], categorical_dims=['origin'], categorical_levels={'origin': origin}, continuous_dims=['horsepower']);
X = gp.prepare_grid()
y = gp.predict_grid(with_noise=False)
gmb.ParrayPlotter(X, y).plot(ax=ax, palette=sns.light_palette(f'C{i}'))
sns.scatterplot(data=cars[cars.origin==origin], x='horsepower', y='mpg', color=f'C{i}', alpha=0.5, ax=ax);
ax.set_title(origin)
ax.set_ylim([5, 50])
Correlated multi-input regression across different classes in a category
[ ]:
gp.fit(outputs=['mpg'], categorical_dims=['origin'], continuous_dims=['horsepower']);
X = gp.prepare_grid()
axs = plt.subplots(1,3, figsize=(18, 4), sharex=True, sharey=True)[1]
for i, (ax, origin) in enumerate(zip(axs, cars.origin.unique())):
y = gp.predict_grid(categorical_levels={'origin': origin}, with_noise=False)
gmb.ParrayPlotter(X, y).plot(ax=ax, palette=sns.light_palette(f'C{i}'))
sns.scatterplot(data=cars[cars.origin==origin], x='horsepower', y='mpg', color=f'C{i}', alpha=0.5, ax=ax);
ax.set_title(origin)
ax.set_ylim([5, 50])
plt.tight_layout()
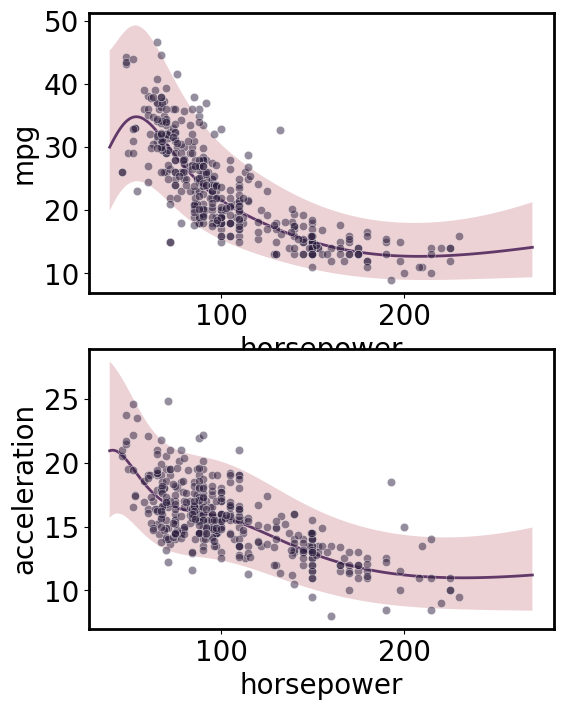
Multi-output regression
[ ]:
gp.fit(outputs=['mpg', 'acceleration'], continuous_dims=['horsepower']);
X = gp.prepare_grid()
Y = gp.predict_grid()
axs = plt.subplots(2,1, figsize=(6, 8))[1]
for ax, output in zip(axs, gp.outputs):
y = Y.get(output)
gmb.ParrayPlotter(X, y).plot(ax=ax)
sns.scatterplot(data=cars, x='horsepower', y=output, color=sns.cubehelix_palette()[-1], alpha=0.5, ax=ax);
plt.tight_layout()
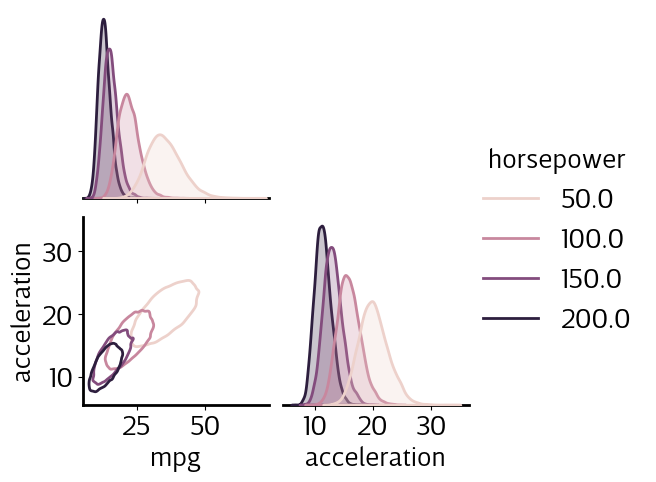
Correlated multivariate sampling from joint predictions
[11]:
X = gp.parray(horsepower=[50, 100, 150, 200])
gp.predict_points(X)
y = gp.predictions
samples_df = pd.concat(
[pd.DataFrame(point.dist.rvs(10000, random_state=j).as_dict()).assign(horsepower=hp.values()) for j, (point, hp) in enumerate(zip(y, X))],
ignore_index=True)
sns.pairplot(samples_df, hue='horsepower', kind='kde', corner=True, plot_kws={'levels': 1});
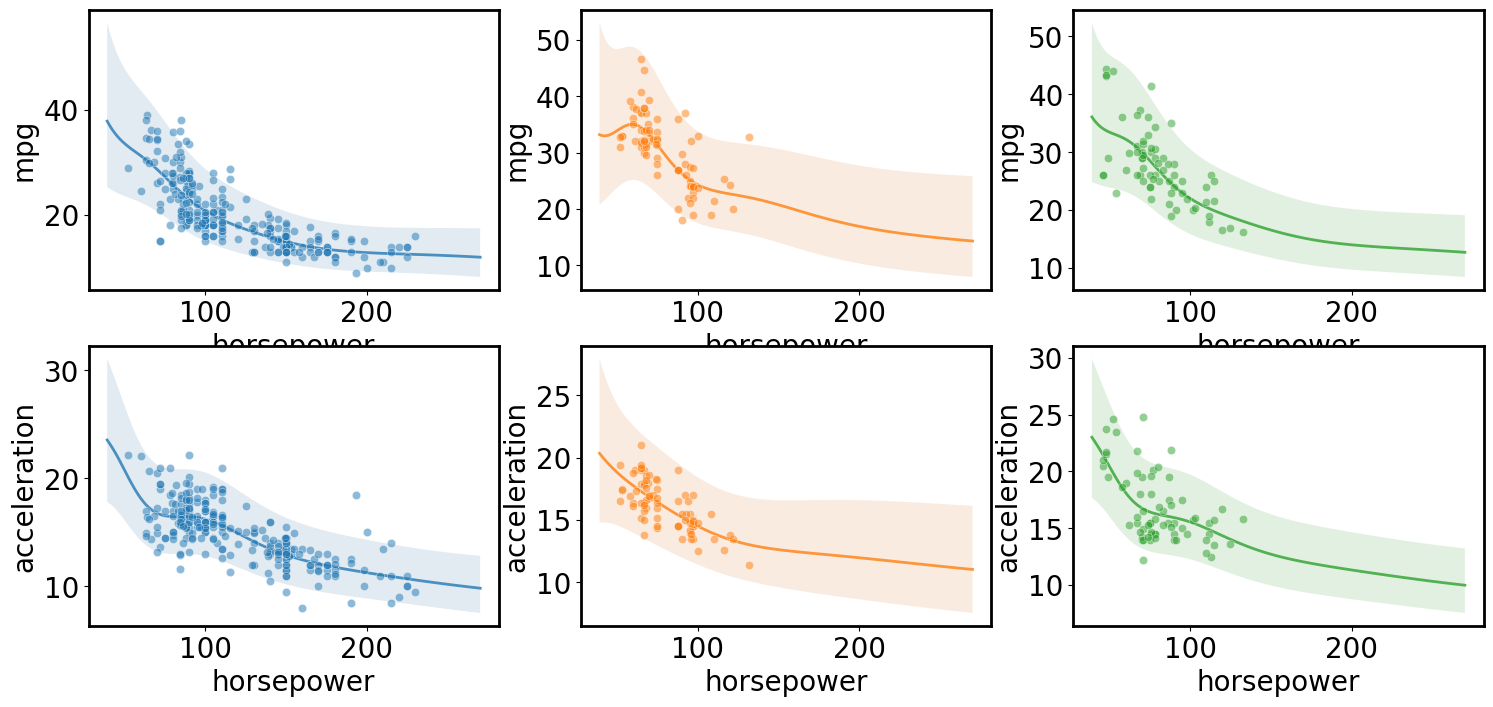
Multi-input multi-output regression
[ ]:
gp.fit(outputs=['mpg', 'acceleration'], categorical_dims=['origin'], continuous_dims=['horsepower'], linear_dims=['horsepower']);
X = gp.prepare_grid()
axs = plt.subplots(2,3, figsize=(18, 8))[1]
for i, (row, origin) in enumerate(zip(axs.T, cars.origin.unique())):
Y = gp.predict_grid(categorical_levels={'origin': origin})
for ax, output in zip(row, gp.outputs):
y = Y.get(output)
gmb.ParrayPlotter(X, y).plot(ax=ax, palette=sns.light_palette(f'C{i}'))
sns.scatterplot(data=cars[cars.origin==origin], x='horsepower', y=output, color=f'C{i}', alpha=0.5, ax=ax);
plt.tight_layout()
Multi-dimensional regression
[13]:
from matplotlib.colors import Normalize
norm = Normalize()
norm(ds.wide.mpg);
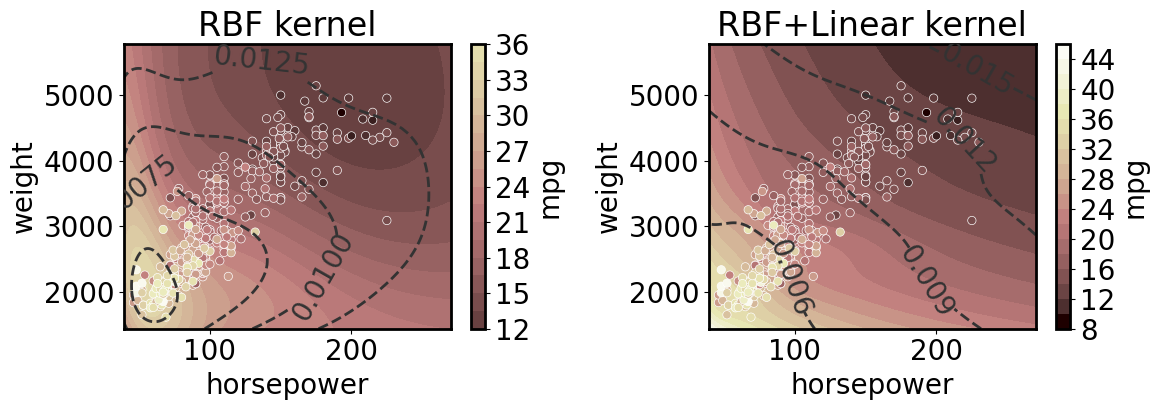
2D regression with and without linear kernel
Note that here we plot the coefficient of variation (with respect to aleatoric and epistemic uncertainty together) as dashed lines.
[14]:
axs = plt.subplots(1,2, figsize=(12, 4.5))[1]
for ax, linear in zip(axs, [False, True]):
linear_dims = ['horsepower','weight'] if linear else None
gp.fit(outputs=['mpg'], continuous_dims=['horsepower','weight'], linear_dims=linear_dims);
XY = gp.prepare_grid()
X = XY['horsepower']
Y = XY['weight']
z = gp.predict_grid()
plt.sca(ax)
pp = gmb.ParrayPlotter(X, Y, z)
pp(plt.contourf, levels=20, cmap='pink', norm=norm)
pp.colorbar(ax=ax)
cs = ax.contour(X.values(), Y.values(), z.σ/z.μ, levels=4, colors='0.2', linestyles='--')
ax.clabel(cs)
sns.scatterplot(data=cars, x='horsepower', y='weight', hue='mpg', palette='pink', hue_norm=norm, ax=ax);
ax.legend().remove()
title = 'RBF+Linear kernel' if linear else 'RBF kernel'
ax.set_title(title)
plt.tight_layout()
3D regression with 2D predictions
Note that here we plot the epistemic uncertainty as dashed lines.
[16]:
cylinders = cars.cylinders.unique()
cylinders.sort()
axs = plt.subplots(1, 5, figsize=(30, 4.5))[1]
gp.fit(outputs=['mpg'], continuous_dims=['horsepower','weight', 'cylinders'], linear_dims=['horsepower','weight', 'cylinders']);
for ax, cyl in zip(axs, cylinders):
XY = gp.prepare_grid(at=gp.parray(cylinders=cyl))
X = XY['horsepower']
Y = XY['weight']
z = gp.predict_grid(with_noise=False)
plt.sca(ax)
pp = gmb.ParrayPlotter(X, Y, z)
pp(plt.contourf, levels=20, cmap='pink', norm=norm)
pp.colorbar(ax=ax)
cs = ax.contour(X.values(), Y.values(), z.σ, levels=4, colors='0.2', linestyles='--')
ax.clabel(cs)
sns.scatterplot(data=cars[cars.cylinders==cyl], x='horsepower', y='weight', hue='mpg', palette='pink', hue_norm=norm, ax=ax);
ax.legend().remove()
title = 'RBF+Linear kernel' if linear else 'RBF kernel'
ax.set_title(f'{cyl} Cylinders')
plt.tight_layout()
